4月7日下午2点,杭州电子科技大学自动化学院(人工智能学院)研究生创新提升“研途成长”专题系列讲座第七期,在科技馆报告厅顺利举行。本次讲座邀请到了圣彼得堡国立电气工程大学(俄罗斯)自动控制博士Denis Efimov教授、控制科学与工程领域研究员Stanislav ARANOVSKIY两位海外名家。自动化学院研一、研二以及圣光机学院共两百多名学生参加了此次讲座。
专家介绍:
Denis Efimov教授简介:
丹尼斯·埃菲莫夫于2001年获得俄罗斯圣光机大学自动控制博士学位,并于2006年获得RAS机械工程问题研究所(俄罗斯圣彼得堡)自动控制科学博士学位。2000年至2009年担任机械工程问题研究所复杂系统控制实验室的研究员。2006年至2011年在L2S CNRS(法国Supelec),Montefiore研究所(比利时列日大学)和IMS CNRS实验室(法国波尔多大学)工作。2011年加入Inria(里尔-北欧中心)。从2018年开始担任Valse团队的负责人。合著150余篇同行评审期刊论文。作为IFAC TC的成员,同时是IEEE的高级成员,还担任IEEE Transactions on Automatic Control、Automatica、IFAC Journal on Nonlinear Analysis: Hybrid Systems和Asian Journal of Control的副主编。

Stanislav ARANOVSKIY研究员简介:
Stanislav Aranovskiy在俄罗斯圣光机大学获得了系统分析与控制的工程师(2006年)和博士(2009年)学位。2014年,Stanislav Aranovskiy加入俄罗斯圣光机大学自适应和非线性控制系统实验室,担任研究员,并于2016年获得自动控制博士学位。自2017年以来,他一直在法国中央司令部工作。他是IEEE的高级成员,也是IFAC和IEEE技术委员会的成员。他的研究兴趣是非线性系统、估计、自适应系统和扰动衰减。

Denis Efimov教授的讲座主题为An introduction to design of interval observers(区间观测器设计简介)。
教授首先介绍了研究背景,实际系统模型的完整信息不可获取,且存在外部干扰或噪声使得测量值不可靠,通过考虑用适当的区间来替代单一的测量值而引出了区间观测器。他指出区间观测器是一种动态系统,提供系统真实状态轨迹的上限和下限。该观测器设计问题是指针对系统,构造两个动态系统,分别给出状态x(t)的上下边界估计和对于任何t≥0,都满足这两个动态系统分别称为系统的上、下界观测器,它们共同称为系统的区间观测器。
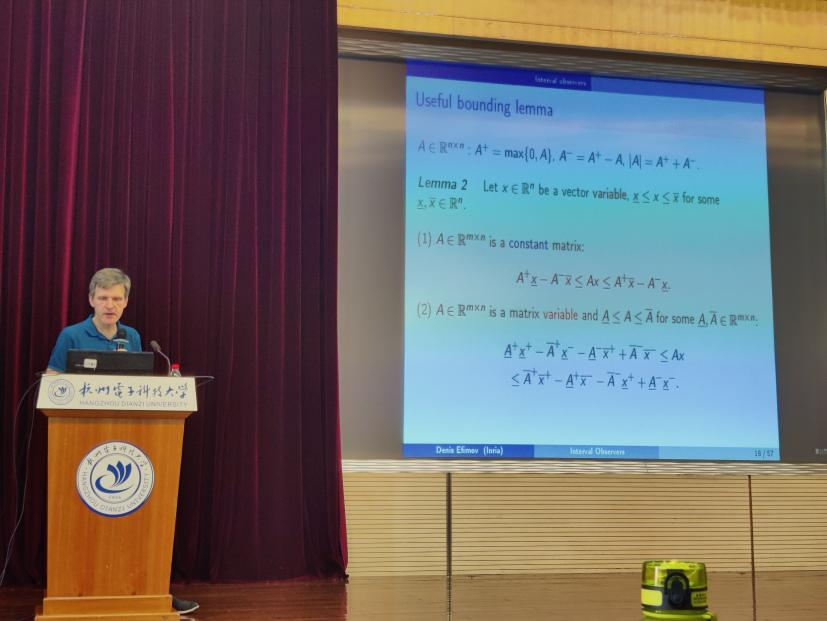
随后,教授分别举例介绍了合作系统、使用区间观测器进行估计的方法、时滞系统的区间观测器及其稳定和模型预测,为同学们详细讲解了相关公式及其推导过程。
最后教授为大家阐述了控制器设计的核心思想:即状态x(t)要求收敛且有界,观测器的稳定性依赖于状态的输入y(t),而对于一般非线性系统的鲁棒性正定并没有通用的方法。他指明,控制设计的新范式即为区间观测器的稳定化。

Denis Efimov教授用一口流利的英文为同学们耐心讲解了控制系统中区间观测器的设计内容与思想,不仅引起了同学们浓厚的兴趣,也激发了同学们的科研热情,另外还向同学们传递了科研人学术人的研究思路,充分达到了本次学术报告的目的。
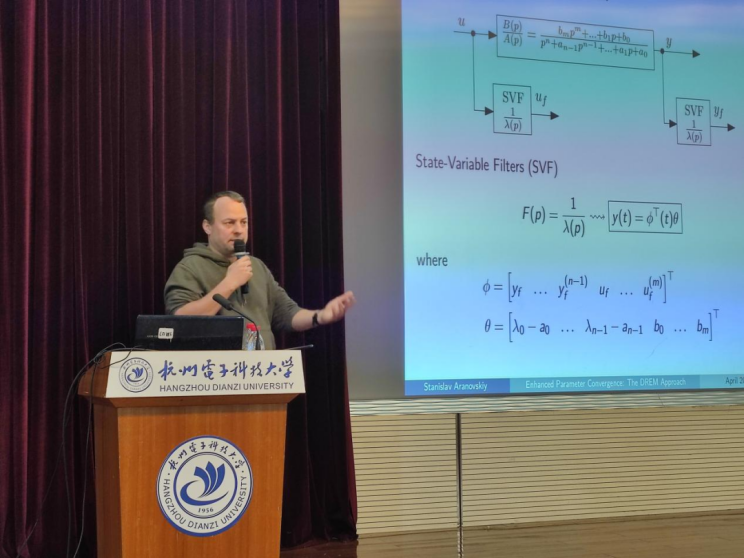
Stanislav ARANOVSKIY教授首先介绍了自己来自于法国一所公立工程师学校——中央理工-高等电力学院,目前在AUT团队进行能源系统控制的研究,主要做分散系统的模型预测控制,动态规划与优化,数据驱动和基于学习的控制。
教授以LTI(线性时不变)系统识别的示例作为出发点,开始为同学们讲解一种增强参数估计的新工具:动态回归器扩展和混合。他指出,传统的标准的增强参数估计的方法不合适的原因是,全局指数的收敛性不能保证控制系统的瞬态性能如峰值现象,瞬态震荡等,且激励是至关重要的参数估计,不容忽视;而选择使用调整增益的方法时,为减少峰值现象,会选择使系统变慢,由于互连导致消除震荡的难度很高,整个调节过程也不清晰。

随后教授为同学们介绍了LTV(线性时变)系统的稳定性和收敛性,并介绍了DREM过程。通过对相关公式的讲解与推到,将该过程运用于了最先提出的示例中,举一反三提出了更简单的解决方案,也即运用到了噪声灵敏度和代数逐点估计,考虑到了噪声诱导项。
最后教授总结了DREM的属性及其灵活性,对于增强参数估计行之有效。该方案在控制工程学科领域具有极大的价值,为致力于自动化领域研究的同学们提供了一种完美的可行性方案。

两场学术讲座,两位教授控制工程领域的科研成果与经验的分享,引起了同学们浓厚的兴趣,激发了同学们的科研热情,也营造了浓厚的学术氛围。期待接下来能邀请到更多的科研前辈加入系列讲座,以提升研究生的学术能力。让我们共同期待下期讲座优秀科研前辈的学术分享吧!